Andreas
Li
About
i build things that move, think, and interact with the real world. studying mechatronics engineering at the University of Waterloo.
i started in competitive robotics 7 years ago, building robots throughout middle and high school, and eventually deciding to go "pro" and turn my hobby into a career. my work sits at the intersection of mechanical design, electronics, and controls.
Cool stuff I've done
- —interned at Tesla as a vehicle design engineer for passive safety systems, working on seatbelt technology to keep people safe
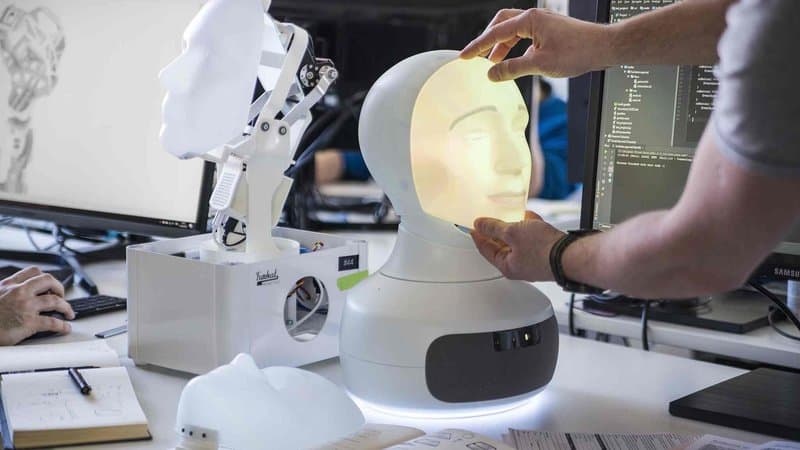
- —assisted in human-robot interaction research at SIRRL in a study partnered with the UWaterloo School of Optometry
- —implemented Martinrea's first autonomous mobile robot system for material delivery, transporting 4,000 lb/hour of materials
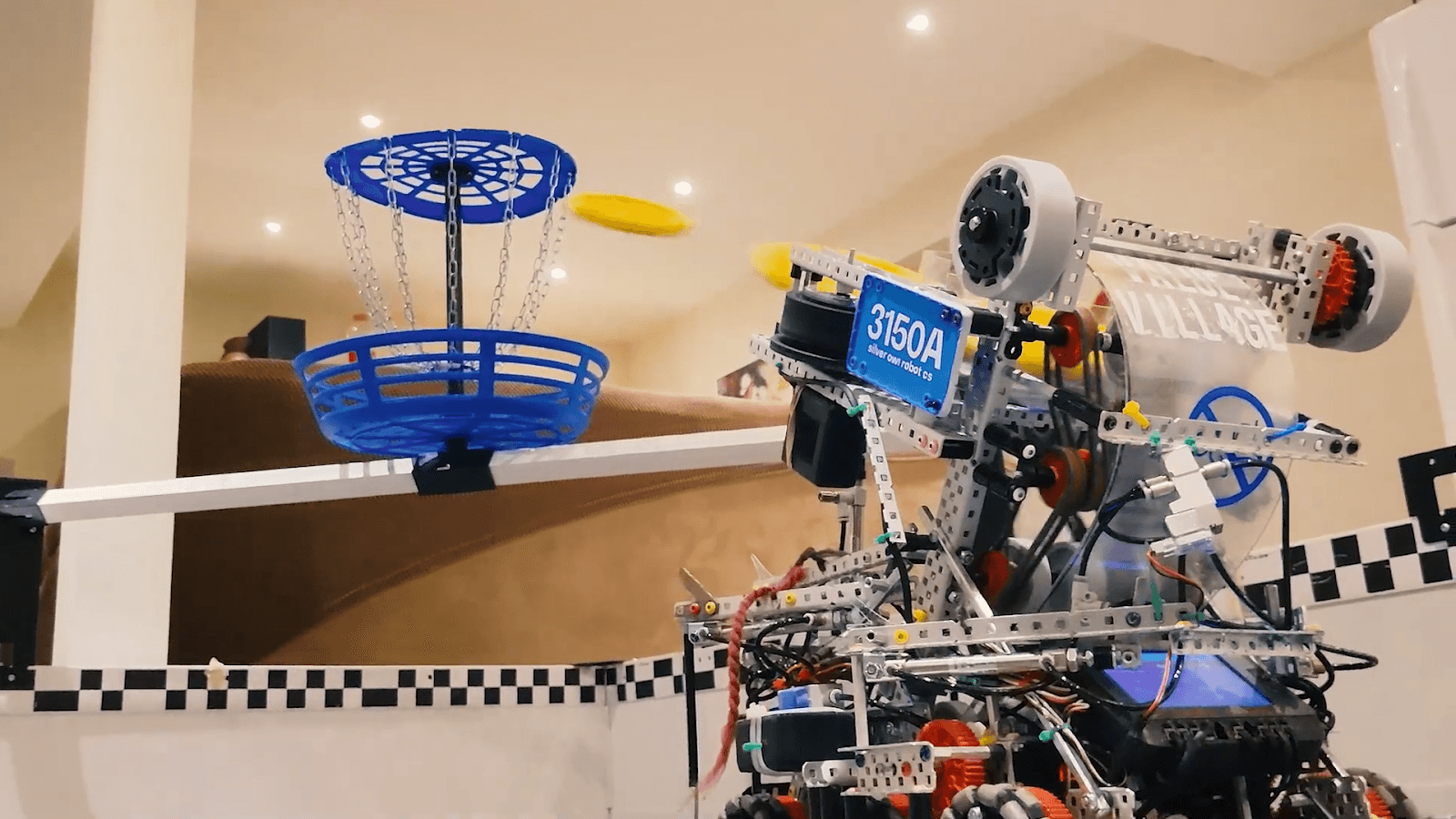
- —built robots with my buddies and won the vex robotics competition ontario provincial championship, representing my province at world championships in Dallas Texas

Experience
03roles
Mechatronics Design Intern - Seatbelts
On the Passive Safety and Restraints team, supported the development of next-generation seatbelt technology for the Cybercab and future programs.
Designed an automated durability rig in Catia 3DX to validate a seatbelt component through tens of thousands of unattended test cycles, integrating a BLDC motor, encoder, and custom firmware for continuous overnight operation. Also designed and built an imaging station and jig and a Python/OpenCV pipeline to characterize a passive safety component, establishing Tesla's first internal method for doing so.
Research Assistant
Assisted in a study exploring LLM-driven human-robot interaction for optometry communication training. Using a Furhat Robot paired with LLMs to simulate realistic patient interactions for optometry students.
Developed 8 distinct patient personas, iterating on prompt design to ensure consistent character alignment, prevent instruction drift, and avoid hallucinations.
Conducted a validation study with participants, evaluating persona performance and character consistency across simulated patient interactions, and collecting qualitative feedback for refinements.

Mechatronics Engineering Intern
Implemented Martinrea's first autonomous mobile robot (AMR) system in a metals plant. Designed 6 AMR-compatible material carts using SolidWorks, capable of transporting over 1,300 lbs of parts.
Built an automated low-stock replenishment system using Raspberry Pi and MQTT, triggering AMR deliveries to production lines when material runs low. Developed a PostgreSQL telemetry database to track AMR missions and sensor data..
Presented the autonomous vehicle systems to investors and guests, communicating design decisions and operational benefits to drive stakeholder confidence.
Projects
02 projects
Let's Connect
Interested in collaborating, have a question, or just want to say hello?